|
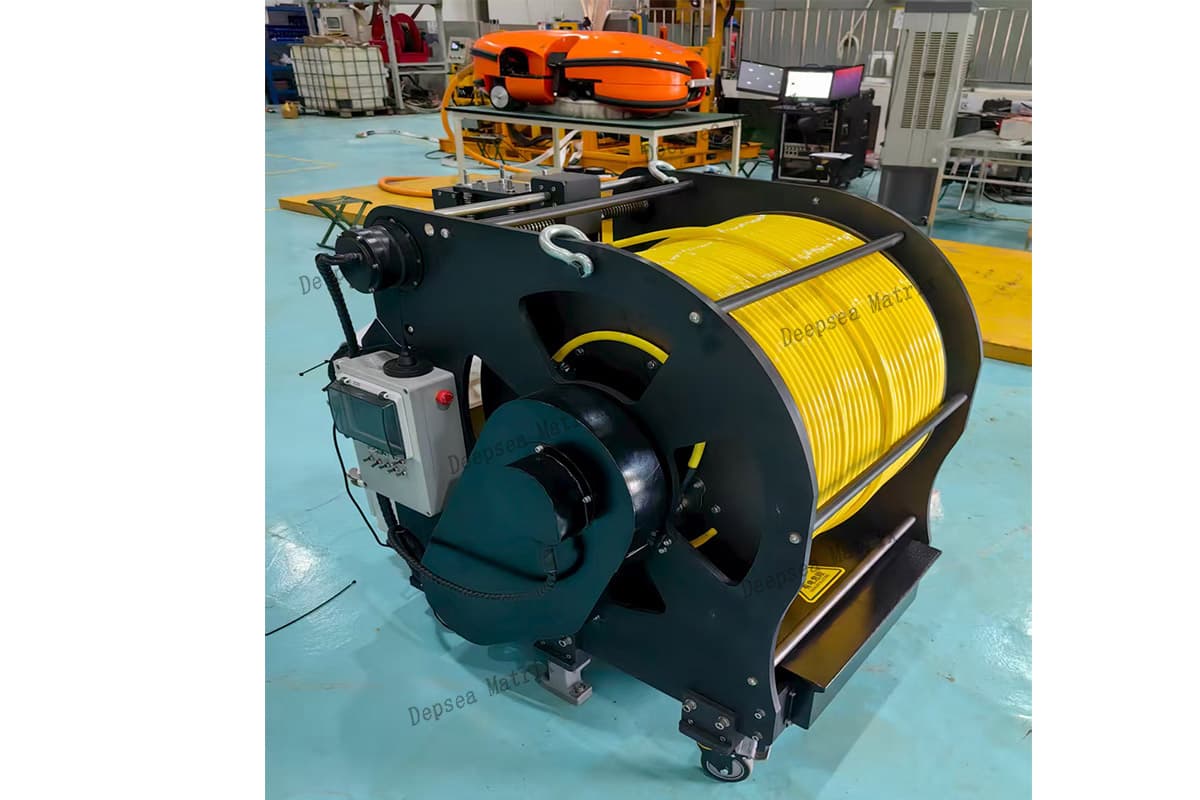
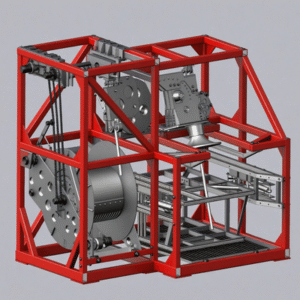
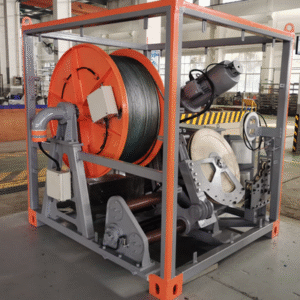
Safe Working Load (SWL) |
Speed Range |
Cable Diameter |
Cable Capacity |
Cable Type |
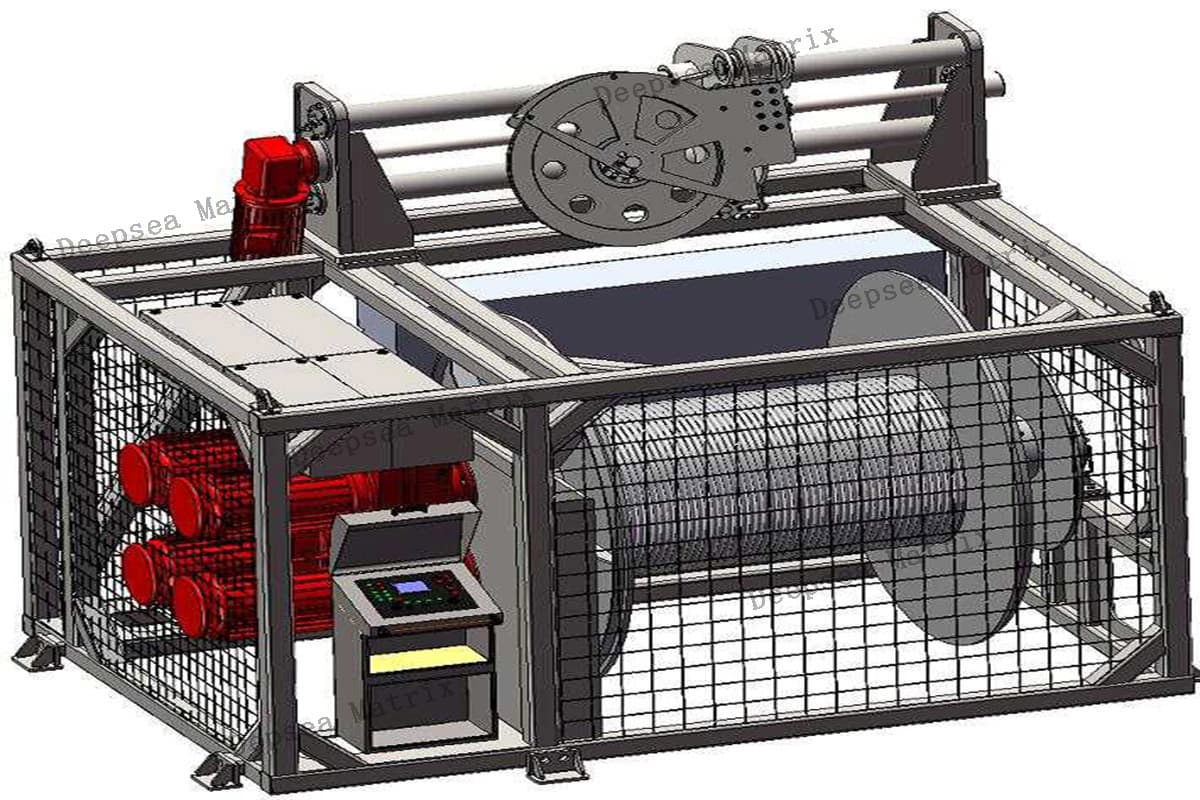
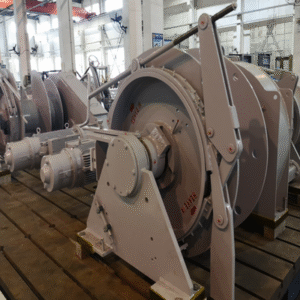
Drive System |
Control Interface |
|
10–250 kN |
0–100 m/min |
20–40 mm |
Up to 6,000 meters |
Armored electro-optical or hybrid umbilical cable |
Hydraulic or electric (variable frequency drive) |
Local, remote, or fully integrated into LARS systems |
|
o Precise control and smooth cable payout/retrieval |
|
o Real-time monitoring of cable length, speed, and tension |
|
o Constant tension control to protect ROV in dynamic sea states |
|
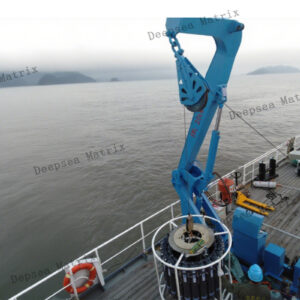
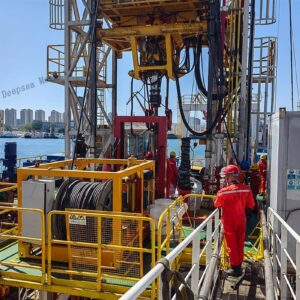
o Integrated with launch and recovery system (LARS) |
|
o Capable of power, video, and telemetry transmission via umbilical |
|
o Weatherproof and corrosion-resistant for harsh marine environments |